












 измерители прочности бетона")
 измерители прочности бетона")




Основные функции приборов:
- Измерение времени и скорости распространения ультразвука в материалах при сквозном и поверхностном прозвучивании
- Определение прочности строительных материалов по установленной градуировочной зависимости
- Оценка прочности бетонов неизвестного состава по градуировочным характеристикам ЦНИИОМПТ
- Возможность установки индивидуальных градуировок для различных видов стройматериалов
- Определение глубины трещин
- Поиск дефектов по аномальному уменьшению скорости распространения ультразвука
- Архивация получаемой в результате измерений информации в памяти прибора, с фиксацией времени, даты, вида, характеристики стройматериала и коэффициента вариации (объем памяти 10000 результатов).
- Передача информации, полученной в результате измерений, на ПК.


Основные функции приборов:
- Измерение времени и скорости распространения ультразвука в материалах при сквозном и поверхностном прозвучивании
- Определение прочности строительных материалов по установленной градуировочной зависимости
- Оценка прочности бетонов неизвестного состава по градуировочным характеристикам ЦНИИОМПТ
- Возможность установки индивидуальных градуировок для различных видов стройматериалов
- Определение глубины трещин
- Поиск дефектов по аномальному уменьшению скорости распространения ультразвука
- Архивация получаемой в результате измерений информации в памяти прибора, с фиксацией времени, даты, вида, характеристики стройматериала и коэффициента вариации (объем памяти 10000 результатов).
- Передача информации, полученной в результате измерений, на ПК.










- Облегченный ударопрочный пластиковый корпус
- Быстросъемный аккумулятор
- Автономная работа с данными без внешнего компьютера
- Сухой акустический контакт
- Адаптация антенного устройства к неровностям поверхности конструкции
- Автоматическое измерение скорости распространения ультразвуковой волны в объекте контроля
- Трехмерное представление внутреннего строения объекта контроля и B-, C-, D-томограмм любого сечения объекта
- Возможность использования томографа при ручном контроле, а также в составе автоматизированных установок
Обработка и представление данных на экране томографа
В приборе используется метод синтезированной фокусируемой апертуры с комбинационным зондированием (САФТ-К), при котором происходит фокусировка ультразвука в каждую точку полупространства. Массив данных формируется путем сбора информации со всех измерительных пар антенного устройства томографа. Принимаемые антенной решеткой сигналы обрабатываются на встроенном компьютере непосредственно в процессе работы.
Затем полученные данные представляются на экране прибора и сохраняются в встроенной флеш-памяти. В результате получается наглядный образ сечения объекта контроля (В-тип), где разными цветами (в зависимости от выбранной цветовой схемы) закодирована отражающая способность каждой точки визуализируемого объема. Время сбора данных и вывода на экран образа сечения в одной позиции решетки – 3 сек.




Режимы работы
A1040 MIRA имеет два основных режима работы, а также функцию настройки конфигурации параметров контроля под каждый конкретный объект с возможностью последующего оперативного выбора:
Режим «ОБЗОР»
Режим предназначен для оперативного просмотра внутренней структуры конструкции в произвольных местах. На экране отображается В-томограмма на глубину до 2 метров.
Дополнительно в данном режиме возможно:
- Автоматическое определение скорости распространения ультразвуковой волны.
- Измерение координат и уровней образов в томограмме.
- Измерение толщины конструкции.
- Просмотр А-Сканов.

Режим «КАРТА»
Режим предназначен для формирования массива данных в форме набора В-томограмм объекта контроля (перпендикулярных поверхности) при сканировании антенной решеткой вдоль ранее размеченных линий с постоянным шагом. Из накопленного 3-х мерного массива данных можно выводить на экран любое изображение В-типа.
Контроль проводится по схеме пошагового сканирования объекта контроля с объединением данных и реконструкцией объема под всей отсканированной площадью объекта контроля.

Функция «НАСТРОЙКА»
Используется для выбора и установки параметров и рабочей конфигурации.
Существует возможность создания и сохранения ряда рабочих конфигураций под различные объекты контроля. Возможность задания имени объекта и технических параметров, с последующим выбором их из памяти прибора перед началом контроля.




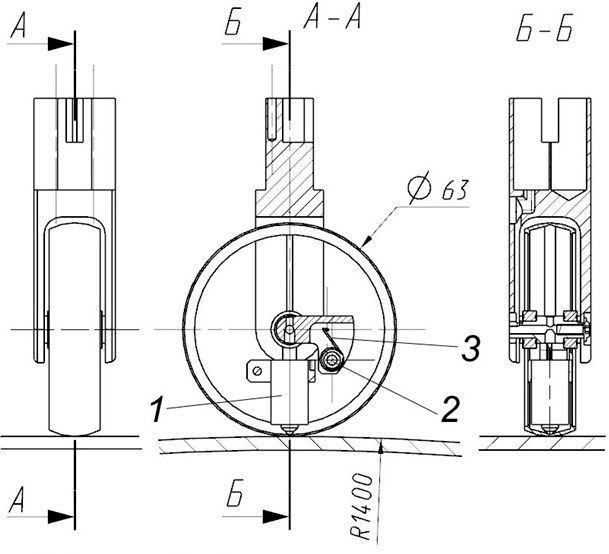
Рис 1.
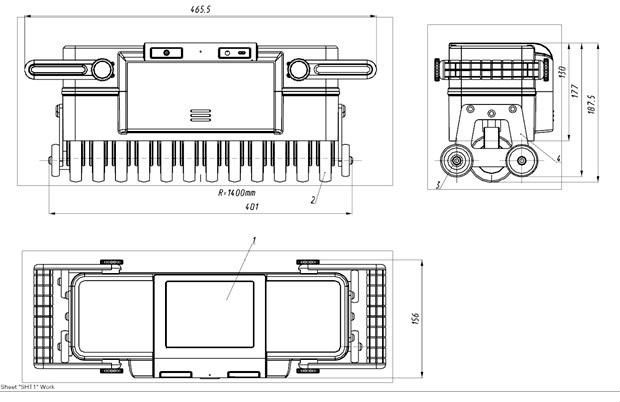
Рис 2.

Рис 3.
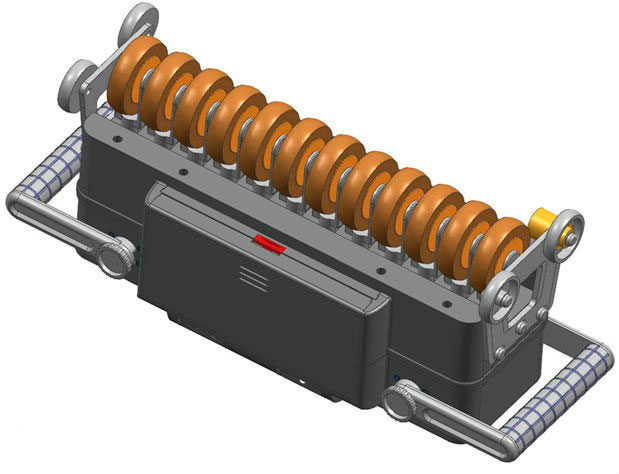
Рис 4.
- Принцип действия сканера-топографа основан на анализе параметров ультразвуковых сигналов, прошедших по материалу объекта контроля на небольшом участке (базе прозвучивания) между каждой парой соседних преобразователей, составляющих линейную антенную решетку
- Изменение разных параметров сигнала, амплитуды принятого сигнала, формы и полярности позволяет отличить сигнал, прошедший по алюминиевой обшивке самолета от сигнала прошедшего в дефектной зоне с другой толщиной и с другой плотностью
- Процесс обработки полученных сигналов включает в себя операции по выделению полезного сигнала из смеси его с шумом, операции измерения или оценки информативных параметров и отображение их на экране сканера-топографа в цветовой кодировке, удобной и понятной оператору
- В результате анализа принимаемых при сканировании ОК колебаний от каждой точки поверхности ОК с дискретностью 10 или 5 мм, в направлении сканирования в памяти аппаратуры сохраняется три информативных параметра от каждой пары соседних элементов АР. Каждая пара элементов АР дает строку изображения, состоящую из точек, в которых будет тем или иным способом отображаться информация о свойствах зоны ОК
- На экране прибора в цветовой кодировке отображается время задержки полезного сигнала, зависящее от материала ОК, толщины, текстуры, если материал волокнистый, и других свойств. Малое время задержки соответствует синему цвету, наибольшее время задержки соответствует красному цвету
- Конструкция УЗ преобразователя с КТСК, основанная на принципе передачи нормальных к поверхности объекта контроля колебаний от пьезоэлемента к ОК и обратно через тонкий промежуточный слой твёрдого материала, выполнена на основе латунного обода колеса, внутри которого и установлена активная часть преобразователя
- Внутренняя поверхность обода колеса выполнена с очень малой шероховатостью (отполирована), что обеспечивает малый уровень шумов в сигнале приёмного преобразователя во время скольжения полированного контактного наконечника активной части преобразователя по поверхности обода
- Вилка колеса, установленная в корпус электронного блока прибора, с возможностью небольшого возвратно-поступательного движения (в пределах 10мм), подпружинена для создания прижима обода колеса к поверхности объекта контроля. (Рис.1)
- Для прозвучивания материала объекта контроля используются пара ультразвуковых преобразователей, установленных рядом с расстоянием 30 мм между их центрами, составляющие 12-ти элементную АР
- Пружина обеспечивает постоянный прижим преобразователей к объекту контроля
- 12-ти элементная линейная АР покрывает поверхность ОК полосой просканированного пространства, состоящей из 11 параллельных линий сканирования, отстоящих друг от друга на 20 мм, что составляет общий размер формируемого изображения равного 220 мм
- Сканер – топограф представляет собой моноблок, содержащий в себе компьютер, АР, устройства управления, отображения результатов контроля и записи их в долговременную память, а также блок автономного питания. (Рис.2)
- АР моноблока смонтирована в нижней части прямоугольного корпуса, который снабжён ручками для его удержания. Ручки имеют несколько фиксированных положений, поэтому их можно установить под разными углами к лицевой панели. Все элементы АР имеют независимый подпружиненный подвес и могут перемещаться вдоль своих продольных осей. Это позволит вести контроль не только плоских участков ОК, но и выпуклых с радиусом кривизны от 1400 мм и более, а также и вогнутых с таким же минимальным радиусом. (Рис.3)
- При сканировании моноблоком поверхности ОК он будет опираться на 4 опорных колеса, а не на колёса элементов АР. При этом элементы будут прижиматься к поверхности ОК независимо друг от друга с силами, определяемыми только внутренними упругими устройствами элементов. От силы прижатия моноблока к ОК они не зависят. (Рис.4)
- Одна из пар опорных колёс закреплена на корпусе моноблока неподвижно. Другая пара установлена на оси, и может, как маятник поворачиваться вокруг неё в небольших пределах, заданных ограничителями. Такое решение обеспечивает устойчивую установку моноблока всеми четырьмя колёсами на поверхность ОК не только цилиндрической формы вдоль образующей, но и под острым углом к ней, а также на поверхности конической, сферической и более сложной формы, но с локальным радиусом кривизны не менее 1400 мм.
- На лицевой панели моноблока в центре расположен дисплей, а по обе стороны от него – 2 клавиатуры для управления прибором. Большое количество кнопок позволит выполнять любые манипуляции по управлению моноблоком с просмотром изображений, записью и считыванием их из памяти для вывода на экран и выполнением анализа и различных измерений




- Малогабаритная матричная антенная решетка на 32 независимых активных СТК элемента с возможностью объединения со второй решеткой для расширения апертуры (горизонтально/вертикально 4х16 и 8х8)
- Высокая скорость обработки и отображения данных с частотой 30Гц.
- Высокая производительность контроля благодаря одновременному излучению и приему сигналов всеми преобразователями
- Удобство визуализации 2D и 3D изображения объекта на мобильном устройстве, соединяемом с антенной решеткой посредством магнитного чехла



- Наглядное отображение сечения (B-Скан) объекта в режиме реального времени с частотой смены кадров до 10 Гц.
- Улучшенная чувствительность в ближней зоне.
- Высокая точность измерений и чувствительность прибора к различным отражателям.
- Размеры обнаруживаемых несплошностей:
- от Ø10 мм – цилиндрический образ дефекта;
- от Ø 25 мм – сферический образ дефекта. - Малогабаритная антенная решетка для длительной работы на объекте.
- Новый тип износостойких СТК преобразователей с безжидкостным контактом.
- Защита преобразователей от грязи и пыли благодаря прочной мембране.
- Чехол для удобного крепления электронного блока на поясе оператора.
Режимы работы
Томограф A1020 MIRA Lite два основных режима работы, а также функцию настройки конфигурации параметров контроля под каждый конкретный объект с возможностью последующего оперативного выбора. В процессе работы можно выбирать различные виды представления данных на экране томографа в зависимости от установленного режима.
Режим «ОБЗОР»
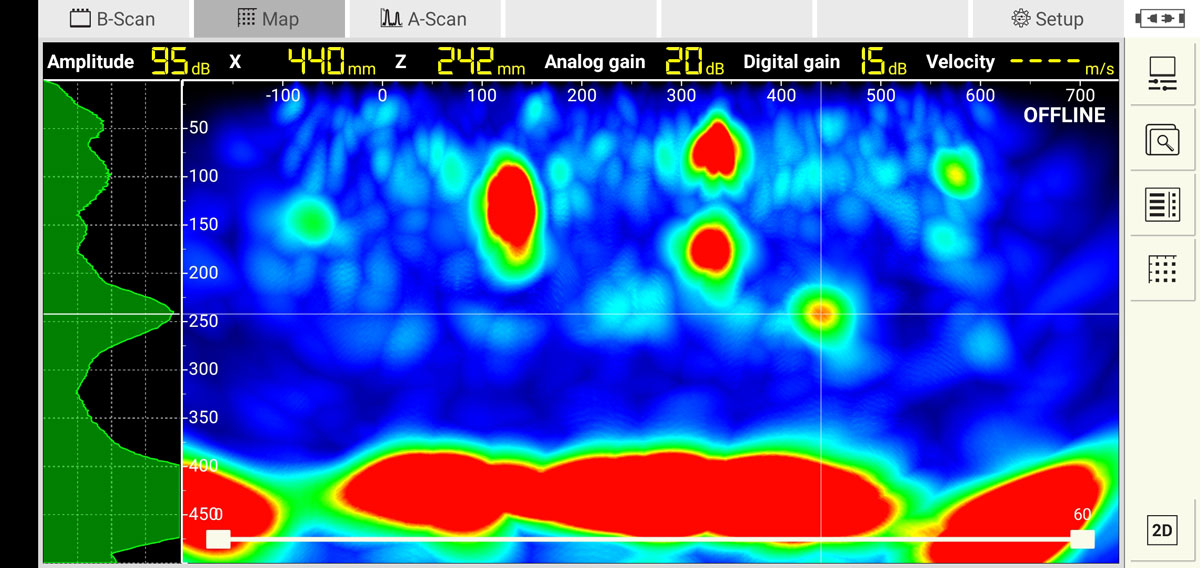
Режим предназначен для оперативного просмотра внутренней структуры объекта контроля в произвольных местах. На экране отображается В-Скан в режиме реального времени с частотой смены кадров до 10 Гц.

Дополнительно в данном режиме возможно:
- Автоматическое определение скорости распространения ультразвуковой волны.
- Измерение координат и уровней образов в томограмме.
- Измерение толщины объекта контроля.
- Сохранение и просмотр В-Сканов.
- Просмотр А-Сканов.
Режим «КАРТА»
Режим предназначен для формирования массива данных в форме набора В-Сканов объекта контроля (перпендикулярных поверхности) при сканировании антенной решеткой вдоль ранее размеченных линий с постоянным шагом. Из накопленного трехмерного массива данных можно выводить на экран любой В-Скан.

Режим «НАСТРОЙКА»
Используется для выбора и установки параметров и рабочей конфигурации. Существует возможность создания и сохранения, с присвоением уникального имени, ряда рабочих конфигураций под различные объекты контроля. Необходимая конфигурация выбирается из списка сохраненных непосредственно на объекте контроля.



- Позиционирование одной рукой с возможностью обновления до версии с двумя ручками и 16 канальной системы для сканирования большой площади
- B-скан в реальном времени и панорамный режим для расширенного сканирования нескольких метров
- Также прибор можно использовать с классическими датчиками

- B-скан создается непосредственно на приборе при выполнении сканирования
- Можно обновить до многоканального
- Тот же прибор может использоваться с классическими преобразователями
