








Скорость регенерации S-скана составляет 100 Гц, что позволяет проводить сканирование сварного соединения одновременно с двух сторон со скоростью до 6-9 метров в минуту.
Одновременно также можно использовать до 2х каналов TOFD, что позволяет проводить контроль, соответствующий всем современным мировым стандартам. Так же в приборе реализована функция обычного классического дефектоскопа.
Современный программный пакет для автоматизированного сбора данных и обработки изображений с разложением в трехмерном виде позволяет наглядно визуализировать контроль.
Возможность задания полной геометрии сварного соединения, включая разнотолщинность, размеры валиков усиления, ширину зоны термического влияния и пр.

Простое и понятное универсальное расположение всех преобразователей на сканере для точного сведения данных в общий скан.

До 4-х групп контроля на каждом ФР преобразователе

Конструктор сканирования для каждой группы

Высокая разрешающая способность и различные виды сканирования : классический S-Скан, сканирование по фиксированному углу (L-scan), комбинированное сканирование (качание луча и перемещение по апертуре) LS-скан (compaund S-scan)

Выравнивание чувствительности по углам и глубине

Анализ результатов после сканирования и "на лету" для быстрой настройки сканера

Два независимых канала TOFD на экране









- Одновременное отображении сигналов во всех каналах ультразвукового контроля в реальном времени

- Полноэкранный просмотр и настройка всех параметров каждого ультразвукового канала
- Независимое ВРЧ в каждом канале контроля.
- Функция калибровки энкодера для точного отсчета координат и точного определения положения дефекта по длине контролируемого сварного шва.
- Сохранение и просмотр результатов ультразвукового сканирования.
- Обработка и анализ проконтролированного участка сварного шва.
- Компьютерная программа анализа результатов контроля и оформления протоколов контроля










- Дисплей: Цветной TFT 135 x 100 мм (640 х 480 точек)
- Работа на прямом солнечном свете и при отрицательных температурах
- Отдельная настройка каждого канала: генератор, приемник, ВРЧ и пр.
- Частота повторения ЗИ:до 2000Гц
- Вывод сигналов в виде А-, С- скана
- Возможность автоматической калибровки на контроль листа заданной толщины
- Автоматический контроль акустического контакта
- Оценка размеров дефекта
- Интерфейс Ethernet
- Питание: Li-ion аккумулятор или внешний блок питания
- до 6-8 часов работы от аккумулятора
- Режим контроля и режим настройки с отображение С-скана
-
Полноэкранный просмотр и настройка всех параметров каждого канала
-
Независимое ВРЧ в каждом канале
-
Автоматическая настройка чувствительности и акустического контакта всех каналов на реальном листе
-
Автоматическое и ручное задание алгоритма обхода листа оператором
-
Сохранение и просмотр результатов измерения по каждому листу


.jpg")








Специальные алгоритмы обработки реализаций (режимы реконструкций)
В практике ультразвукового контроля встречаются объекты с плоскопараллельными поверхностями с известным расстоянием между ними, например, поковки, прокат с известной толщиной, сварные соединения с удаленными валиками усиления. Для них можно использовать специальные алгоритмы реконструкции, которые учитывают отражения от параллельных стенок.
В плоскопараллельном слое материала ультразвуковые волны от элементов антенной решётки распространяются не только по кратчайшим траекториям, но и претерпевают отражения от донной поверхности и поверхности сканирования. На пути к любой точке А в ОК от каждого элемента антенной решётки таких отражений может быть несколько (рисунок 2-12).
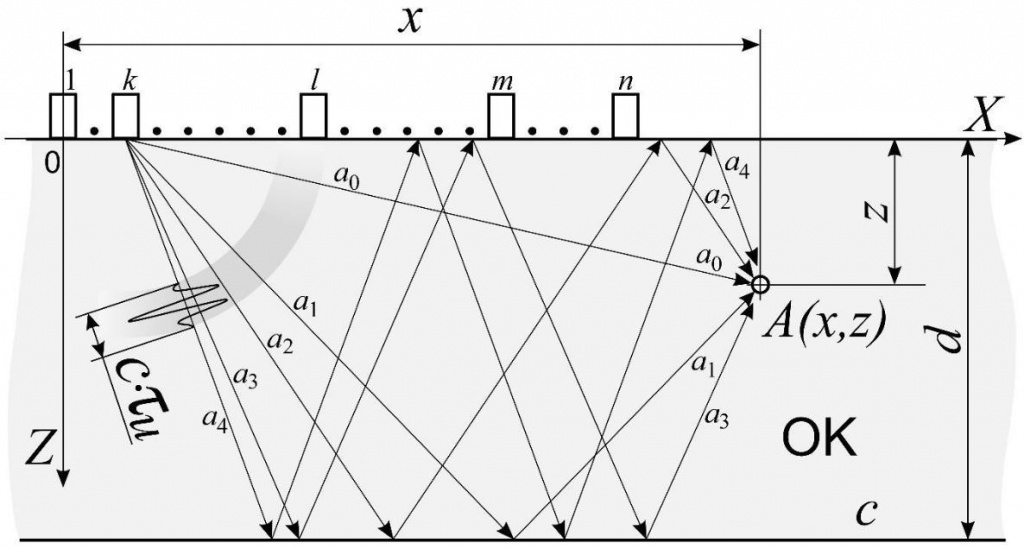
Рисунок 2-12 – Траектории ультразвуковых волн в плоскопараллельном ОК
В режиме ЦФА, благодаря независимому доступу к любому фрагменту каждой реализации, можно при реконструкции изображения выбирать разные группы фрагментов, соответствующие определённым траекториям распространения УЗ сигналов в ОК.
Так, если использовать сигналы с чётным количеством отражений (чётный алгоритм) от границ ОК, то в изображении будут присутствовать образы несплошностей, диффузно отражающих УЗ колебания.
Если использовать сигналы с нечётным количеством отражений (нечётный алгоритм), то на экране будут прорисованы зеркально отражающие несплошности с преимущественно вертикальной ориентацией по нормали к поверхностям ОК(рисунок 2-13).
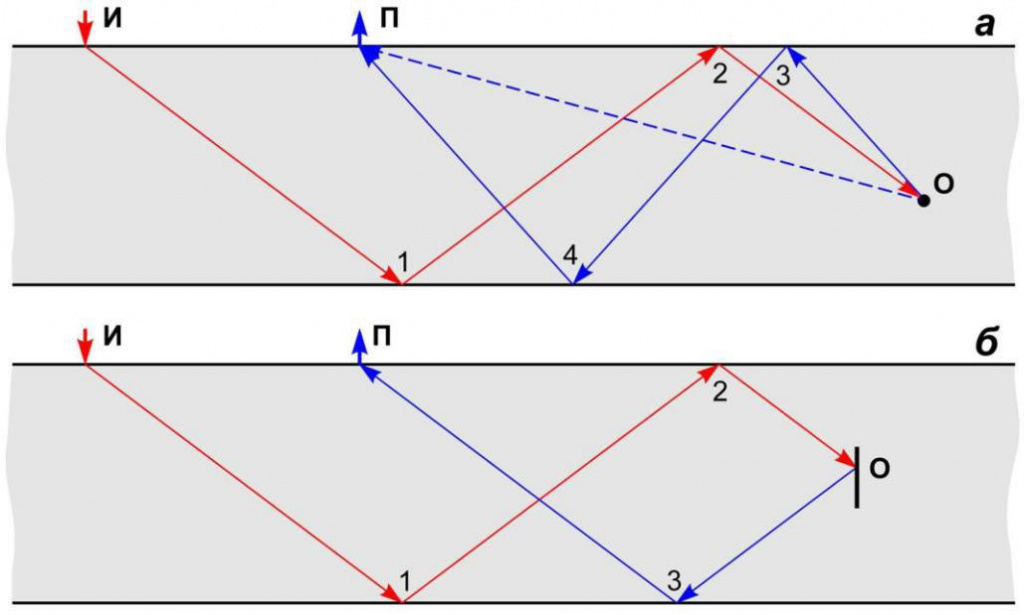
Рисунок 2-13 – Примеры чётной (а) и нечётной (б) траекторий распространения УЗ сигнала от излучающего элемента решётки («И») к приёмному («П»). Цифрами обозначены номера отражений сигнала от границ ОК. «О» – отражатель
Также можно использовать все сигналы, как с чётным, так и с нечётным числом отражений, при этом будет обеспечиваться наилучшая прорисовка поверхностей несплошностей, имеющих сложную форму. Такой алгоритм обработки называется мульти-алгоритмом.
Таким образом, меняя алгоритмы обработки реализаций, можно реконструировать изображение одного и того же сечения ОК, выделяя отражатели разного вида. Включив мульти-алгоритм возможно увидеть изображение, которое может повторять реальную поверхность несплошности.
Рассмотрим применение различных алгоритмов обработки реализаций на примере построения изображения БЦО диаметром 6 мм в мере СО-2.
Активация переключения режимов реконструкций в приборе производится клавишей F3. Выбор нужного режима осуществляется клавишами ← → .
На рисунке 2-14 показаны направления хода некоторых пучков ультразвуковой волны до отверстия и их отражение от него.
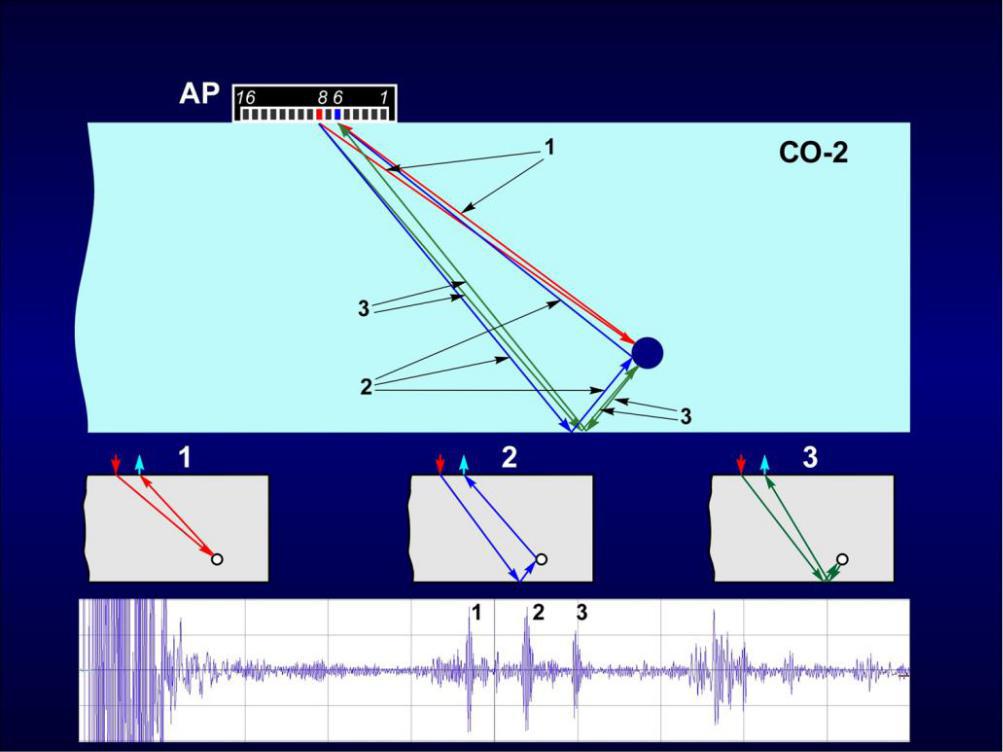
Рисунок 2-14 – Направление некоторых пучков ультразвуковой волны и их отражение от поверхности БЦО
Эхо-сигнал 1 получен пучком, который достиг БЦО без отражений от границ меры СО-2. Визуализация только этого пути возможна с применением обычного алгоритма без учёта отражений  (алгоритм полупространства). Данный алгоритм является тоже чётным алгоритмом. Под образом, полученным по пути 1, наблюдаем образ, полученный по пути 3 (рисунок 2-15).
(алгоритм полупространства). Данный алгоритм является тоже чётным алгоритмом. Под образом, полученным по пути 1, наблюдаем образ, полученный по пути 3 (рисунок 2-15).
Рисунок 2-15 – Сигнал по траектории 1. Режим полупространство
Эхо-сигнал 3 получен с двумя отражениями от донной границы меры. Визуализация только его возможна с применением алгоритма, который называется «Режим приповерхностных дефектов» и тоже является чётным алгоритмом (рисунок 2-16).
Рисунок 2-16 – Сигналы по траектории 3. Режим приповерхностных дефектов
Если включить «Режим пластины», то мы увидим образы, полученные по пути 1 и пути 3 вместе (рисунок 2-17).
Рисунок 2-17 – Сигналы по траекториям 1 и 3. Режим пластины. Чётный алгоритм
Эхо-сигнал 2 получен с одним отражением от донной границы образца, визуализация его возможна только с применением нечётного алгоритма, который называется «Режим вертикальных трещин» (рисунок 2-18).
Рисунок 2-18 – Сигналы по траектории 2. Нечётный алгоритм
Если включить мульти-алгоритм (режим нескольких алгоритмов), то на экране дефектоскопа получим изображение по всем трём путям (рисунок 2-19). Оно очень похоже на реальную поверхность отверстия.
Рисунок 2-19 – Сигналы по траекториям 1, 2, 3. Мульти-алгоритм
Показанные выше изображения получены при установленном в параметре «Макс. число отражений SAFT» значении «3». Данный параметр находится на второй странице режима НАСТРОЙКА и определяет количество отражений от поверхностей, которое будет участвовать в реконструкции изображения.
Фактическое число отражений ультразвуковых сигналов от донной и верхней границ ОК на траектории от АР к визуализируемому отражателю и обратно к АР приведено в таблице.

В нашем случае, при установленном по умолчанию значении параметра «Макс. число отражений SAFT» – «3» при выборе режимов реконструкции  ,
, в реконструкции принимают участие сигналы, которые претерпели два отражения от поверхностей (чётный алгоритм), при выборе режима
в реконструкции принимают участие сигналы, которые претерпели два отражения от поверхностей (чётный алгоритм), при выборе режима  анализируются сигналы до трёх отражений (нечётный алгоритм), при выборе
анализируются сигналы до трёх отражений (нечётный алгоритм), при выборе  анализируются и чётный и нечётный алгоритм.
анализируются и чётный и нечётный алгоритм.





СУЩНОСТЬ И СВОЙСТВА ТОМОГРАФИЧЕСКОГО РЕЖИМА
Антенные решётки и сканы (томограммы)
Дефектоскоп в режиме ТОМОГРАФ воспроизводит на экране изображения сечений материала контролируемого объекта. Будем называть их томограммами. В этом режиме для излучения и приёма ультразвука используются многоэлементные антенные решётки продольных и поперечных УЗ волн. В приборе в качестве базовых используются 16-элементные линейные антенные решётки. Устройство данных антенных решёток схематично показано на рисунке 2-1.
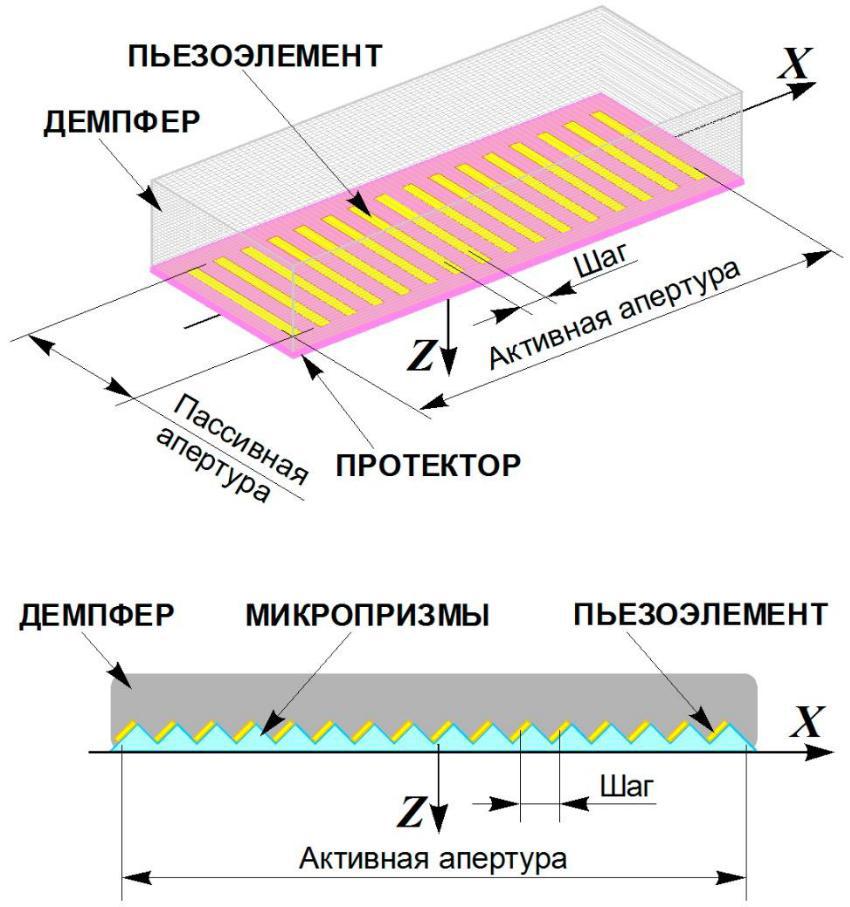
Рисунок 2-1 – Устройство антенных решёток. Прямая решётка продольных УЗ волн (вверху), наклонная решётка поперечных УЗ волн (внизу)
Решётка продольных волн представляет собой ряд одинаковых прямоугольных пьезоэлементов, приклеенных к тонкому протектору из твёрдой керамики. Они уложены длинными сторонами друг к другу с некоторым шагом. Каждый пьезоэлемент решётки является прямым совмещённым УЗ преобразователем. Весь ряд пьезоэлементов расположен вдоль продольной оси рабочей поверхности решётки, совпадающей с осью координат X. Общая длина этого ряда в направлении продольной оси образует активную апертуру решётки. Длина одного пьезоэлемента (она перпендикулярна продольной оси решётки) называется пассивной апертурой.
Антенная решётка поперечных волн отличается от решётки продольных волн только тем, что в ней каждый пьезоэлемент установлен на свою клинообразную микропризму. Благодаря трансформации продольной волны в поперечную при преломлении УЗ колебаний на границе призма – металл в ОК излучаются поперечные УЗ волны. В этой решётке каждый пьезоэлемент является, по сути, наклонным УЗ преобразователем.
Основной тип томограмм, который используется для анализа информации при ручном контроле – В-томограмма или В-Скан. Это изображение сечения ОК, плоскость которого перпендикулярна поверхности объекта и совпадает с продольной осью рабочей поверхности антенной решётки. В этой плоскости лежат акустические оси всех элементов решётки, и в этой плоскости происходит визуализация внутренней структуры ОК (рисунок 2-2).
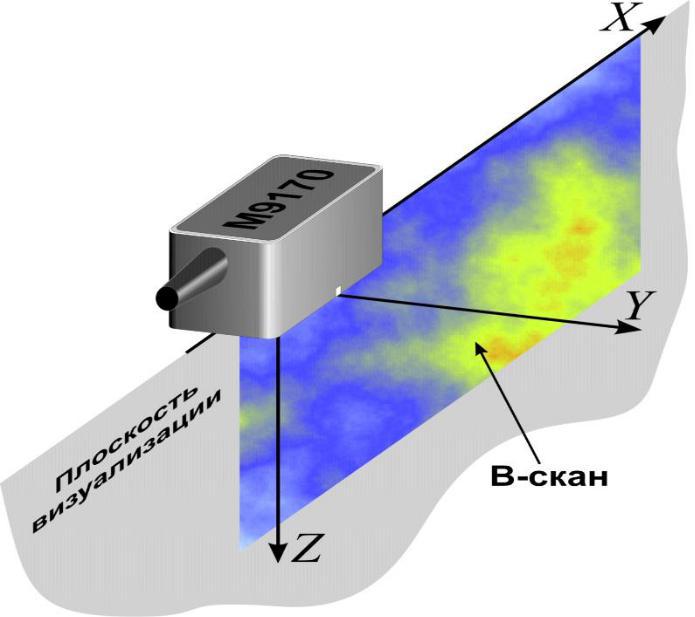
Рисунок 2-2 – Взаимное расположение антенной решётки и реконструируемой В-томограммы в системе координат
Плоскость визуализации по терминологии традиционной дефектоскопии можно назвать также плоскостью падения или основной плоскостью.
Все вероятные нарушения сплошности материала ОК, границы раздела сред (металл – воздух, металл – жидкость), а также возможные проявления нерабочих типов УЗ волн отображаются на экране прибора в виде засветок (точек, пятен, полос) другой яркости или цвета по отношению к фону. Эти засветки будем называть образами. Их форма, размеры и яркость (цвет) зависят от вызвавшей их причины.
Часто, (но не всегда), форма образа может быть похожа на форму отражающей границы достаточно крупной несплошности металла, попавшей в визуализируемое сечение. Малоразмерные несплошности дают образы в виде сосредоточенных пятен.
При сканировании ОК в направлении поперечной оси рабочей поверхности антенной решётки (в направлении оси Y, как показано на рисунке 2-3) с использованием датчика пути происходит последовательная запись в память прибора В-томограмм с некоторым выбранным шагом между томограммами. При этом на экран выводятся изображения С-типа и D-типа (кратко С-Скан и D-Скан). Эти изображения извлекаются из массива записываемых В-Сканов.
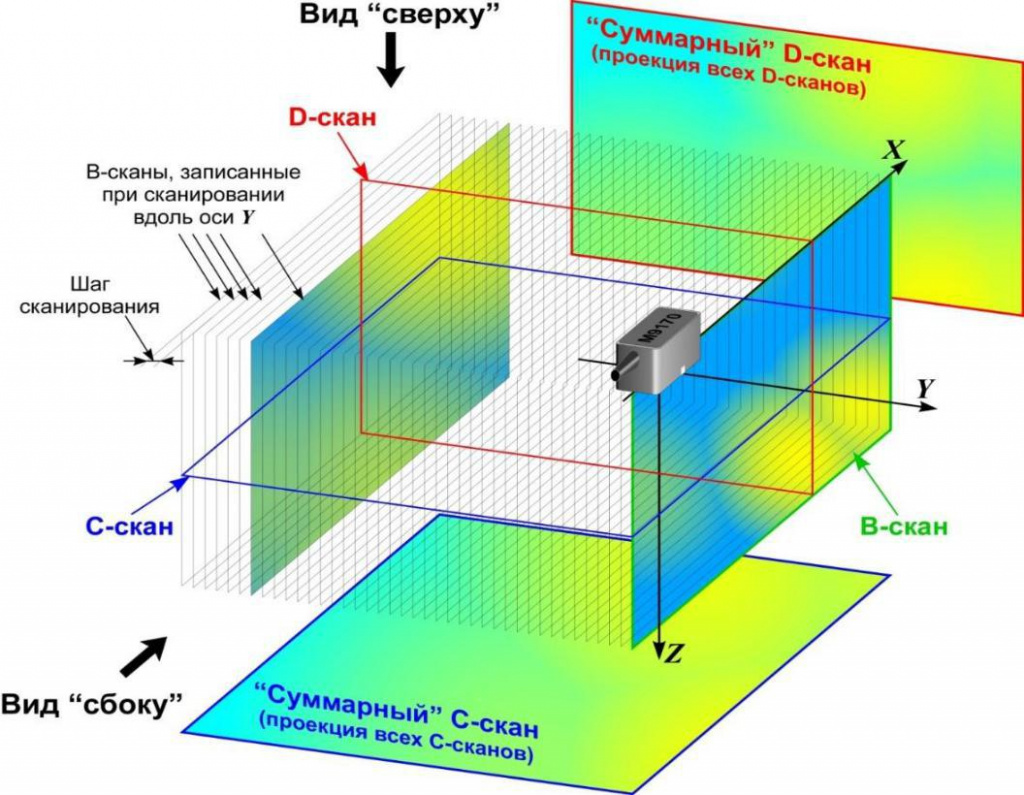
Рисунок 2-3 – Взаимное расположение антенной решётки и всех изображений дефектоскопа, реконструируемых в процессе сканирования решёткой объекта контроля
С-Скан – изображение вида «сверху». Оно представляет собой изображение сечения ОК, плоскость которого параллельна внешней поверхности ОК и расположена на некоторой выбранной глубине.
D-Скан – изображение вида «сбоку». Оно отображает сечение ОК, перпендикулярное его поверхности и параллельное направлению сканирования.
Все три сечения ОК, отображаемые томограммами В-, С- и D- типов, взаимно перпендикулярны.
Принцип действия томографа
Принцип действия томографа значительно отличается от действия приборов с фазированными антенными решётками. Излучение и приём УЗ колебаний в томографе происходит поочерёдно отдельными парами пьезоэлементов (элементов) антенной решётки. Эту очерёдность поясняет рисунок 2-4.
Очерёдность такова:
первый – излучатель, он же – приёмник;
- затем второй – излучатель, первый снова – приёмник;
- далее третий – излучатель, первый опять – приёмник;
- и так до последнего 16-го элемента решётки, посылающего в ОК зондирующий импульс. Т. е. первый элемент решётки по очереди принимает УЗ сигналы от каждого элемента решётки.
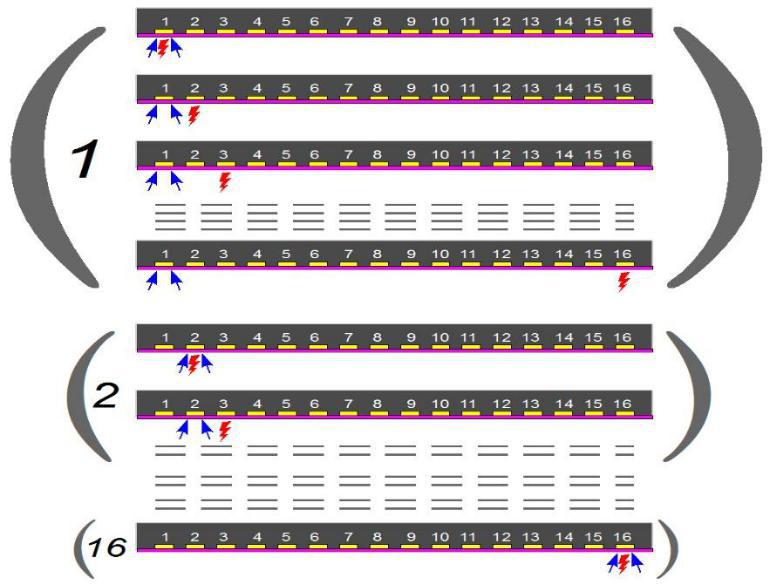
Рисунок 2-4 – Очерёдность посылок зондирующих импульсов в ОК и приёма УЗ колебаний элементами антенной решётки
Далее очерёдность повторяется, но со второго элемента, затем с третьего и т.д.
Полный цикл излучения и приёма сигналов заканчивается, когда последний 16-й элемент антенной решётки пошлёт в ОК зондирующий импульс и он же примет УЗ сигналы из него.
При такой работе в прибор попадают полностью независимые друг от друга реализации УЗ колебаний от каждой пары элементов антенной решётки (излучатель – приёмник).
Реализация – это последовательность УЗ сигналов, принимаемых элементом решётки в течение заданного интервала времени от момента зондирующего сигнала, преобразованная в электрические колебания и записанная в память прибора. В реализации наряду с полезными эхоимпульсами всегда присутствуют разные помехи, шум структуры металла и шум приёмного тракта.
Независимость реализаций заключается в том, что каждая из них является откликом материала ОК только на один зондирующий импульс одного элемента решётки. Никаких сложений акустических полей от нескольких и даже двух элементов решётки здесь нет, поэтому нет никаких УЗ пучков и управления ими. В любой момент времени есть только рассеянное слабонаправленное излучение УЗ импульса с таким же малонаправленным приёмом УЗ колебаний из ОК (рисунок 2-5).
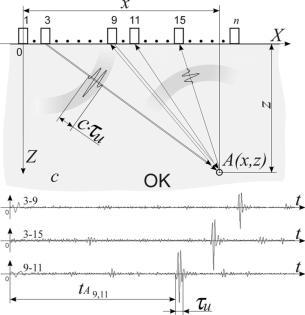
Рисунок 2-5 – Схема излучения – приема в режиме ЦФА
После полного перебора всех пар элементов антенной решётки с излучением и приёмом УЗ колебаний цикл зондирования начинается снова по приведённой схеме. В каждом таком цикле реконструируется одна В-томограмма. Перебор пар элементов в цикле происходит очень быстро, частота смены изображений на экране прибора составляет от 20 до 60 Гц.
Реконструкция (восстановление) изображения (томограммы) – это процесс работы вычислительного блока томографа, заключающийся в преобразовании по определённому алгоритму массива реализаций УЗ колебаний, принятых из ОК, в массив данных об отражательной способности точек визуализируемого пространства ОК.
Реконструкция томограммы происходит следующим образом (рисунок 2-6).
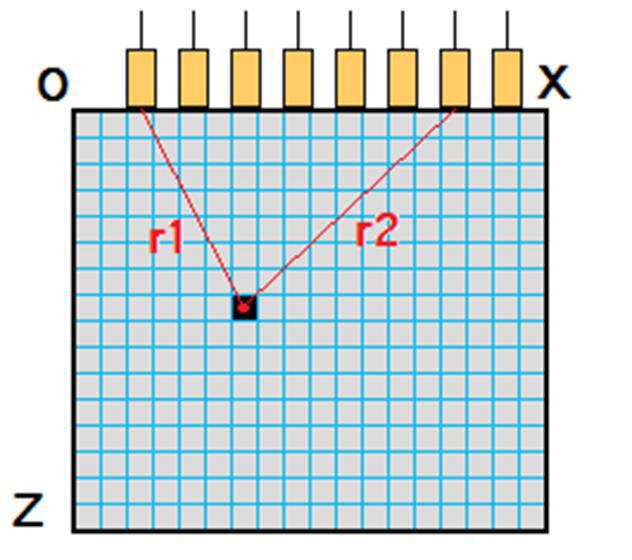
Рисунок 2-6 – Точки (пикселы) томограммы
Для каждой точки томограммы из каждой принятой реализации выбираются короткие отрезки колебаний длительностью равной длине зондирующего импульса (c∙τi) (где с – скорость УЗ волны, τi – длительность зондирующего импульса) и временем пролёта УЗ импульса от излучившего зондирующий сигнал элемента решётки к визуализируемой точке материала ОК и обратно к приёмному элементу. Эти выбранные отрезки суммируются, и результирующая сумма (в виде такого же отрезка колебаний) записывается в отдельную ячейку памяти. Если в какой-либо визуализируемой точке ОК есть неоднородность материала, то эхосигналы от неё, присутствующие в каждой реализации, накапливаются (складываются в фазе) в ячейке памяти, соответствующей этой точке ОК. Если неоднородности нет, то в памяти накапливаются только колебания шумов (рисунок 2-7).
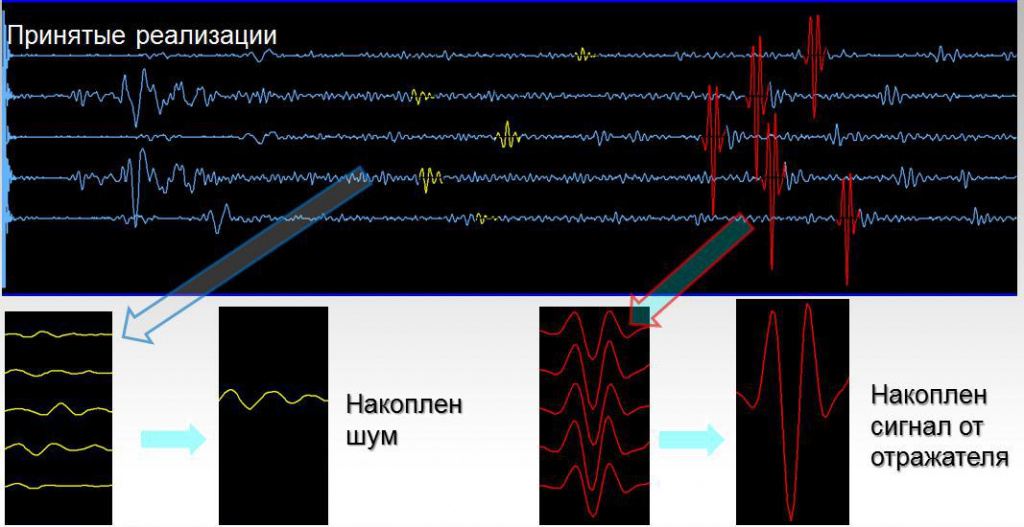
Рисунок 2-7 – Накопление сигналов
Затем колебания в этих ячейках детектируются, и результирующие числа, пропорциональные отражательной способности соответствующих точек материала ОК, отображаются на экране в виде точек разной яркости или цвета. Таким образом, томограмма представляет собой прямоугольный растр точек, яркость или цвет которых пропорциональны отражательной способности соответствующих точек материала ОК. Причём каждая точка томограммы получена как результат виртуальной фокусировки всех элементов решётки в соответствующую ей точку ОК.
Фокальная зона линейной антенной решётки
Поскольку АР фокусируется в каждую точку пространства, именно фокальная зона решётки и определяет все амплитудные и геометрические зависимости образа несплошности от её координат, размеров, типа и ориентации.
Фокальной зоной любой акустической фокусирующей системы является область пространства вокруг фокуса, в пределах которой амплитуда акустических колебаний превышает определённый уровень относительно её значения в фокусе. Для режима излучения-приёма это область, внутри которой точечный отражатель даёт эхосигнал с амплитудой, превышающей определенный уровень от значения амплитуды эхосигнала от отражателя в фокусе.
Для оценки качества изображения, разрешающей способности прибора и его измерительных свойств особое значение имеют размеры фокальной зоны в основной плоскости падения УЗ волн антенной решётки XOZ (B-Скан) (рисунок 2-8).
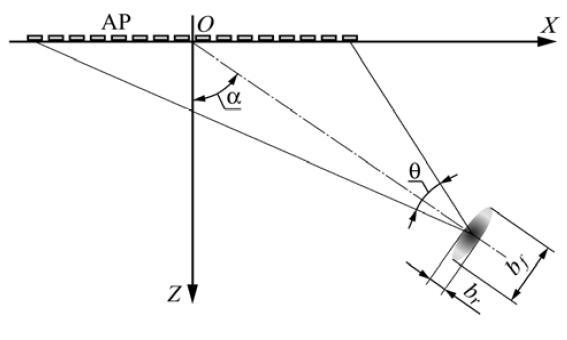
Рисунок 2-8 – Схема сечения ОК в плоскости визуализации (В-Скан) в принятой системе координат с элементами линейной антенной решётки и фокальной зоной
Размер br – размер фокальной зоны вдоль направления на фокус (лучевой размер фокальной зоны) почти не зависит от фокусного расстояния, если оно превышает размер активной апертуры решётки. В этом случае br в основном определяется длиной зондирующего импульса дефектоскопа:
br ≈ c × t ,
где c – скорость УЗ волн в ОК;
t – длительность зондирующего импульса.
Главное значение имеет размер bf – фронтальный размер фокальной зоны в направлении перпендикулярном линии, проходящей через центр апертуры антенной решётки и точку фокуса. Именно этот размер зависит от фокусного расстояния и от угла α между нормалью к апертуре решётки и направлением на точку фокуса. Угол α назовем направляющим углом.
Размер bf фокусирующей системы, работающей на излучение и приём, по уровню минус 6 дБ от максимума зависит от длины УЗ волны λ и угла θ, под которым «видна» активная апертура системы из точки фокусировки и может быть вычислен по формуле:
На рисунке 2-9 приведен график зависимости фронтального размера bf фокальной зоны от координат x, z для антенной решётки поперечных волн М9170 с апертурой А = 28 мм и рабочей частотой 4 МГц. Длина волны в стали λ = 0,8 мм. На графике величина bf представлена линиями равных значений в миллиметрах.
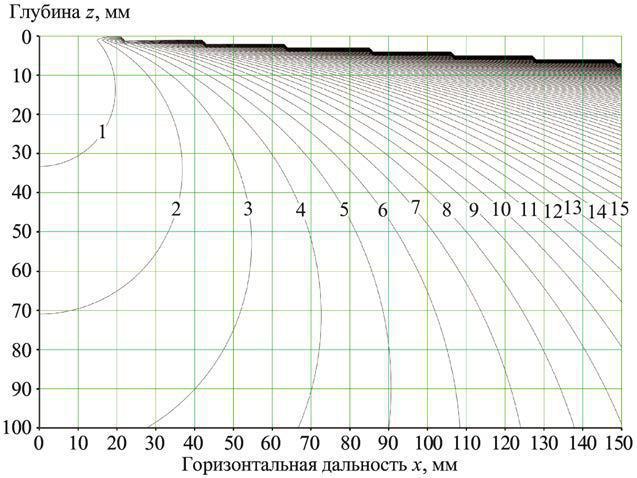
Рисунок 2-9 – Зависимость фронтального размера фокальной зоны антенной решётки М9170 от координат в плоскости визуализации
Видно, что с увеличением фокусного расстояния и направляющего угла α, размер bf фокальной зоны увеличивается. Так, например, в точке с координатами x = 140 мм и z = 65 мм фокальная зона равна 10,5 мм, а при той же глубине и x = 50 мм – порядка 2,9 мм. При углах α больше 80° даже при небольших расстояниях от АР параметр bf становится большой.
Причина ухудшения фокусировки антенной решётки с ростом направляющего угла α в монотонном уменьшении её эффективной апертуры Аэ = А cosα вплоть до нуля при α = 90°. Поэтому этот сектор между углами 80° и 90° малопригоден при контроле. Стоит определить границу, за которой фокусировка антенной решётки малоэффективна. Критерием может служить примерное равенство фронтального размера фокальной зоны ширине пучка УЗ волн от несфокусированного преобразователя. Согласно фундаментальному правилу, фокусировка возможна только в пределах ближнего поля синфазного (несфокусированного) излучателя, границей является дальность, равная протяженности ближней зоны излучателя. А ширина пучка несфокусированного преобразователя на границе ближней зоны в эхо-режиме по уровню –6 дБ от максимума приблизительно равна четверти апертуры преобразователя.
Поскольку антенная решётка наклонная, то каждому направляющему углу α соответствует своя апертура Аэ и наклонная дальность Rб, определяющая границу ближней зоны:
Поэтому граница ближней зоны антенной решётки тоже зависит от угла α. И этой границей для конкретной антенной решётки служит одна из кривых на поле графика зависимости фронтального размера фокальной зоны от координат фокуса (рисунок 2-9). Это кривая со значением размера bf, равным четверти активной апертуры А антенной решётки.
В частности, для антенной решётки М9170 граница ближней зоны – это кривая bf = 7 мм, так как её апертура равна 28 мм. Область графика на рисунке 2-9 внутри этой кривой (левее и ниже) – ближняя зона. Вне этой кривой (правее и выше) – дальняя зона, в которой фокусировка почти отсутствует и далее совсем пропадает, то есть антенная решетка работает как обычный преобразователь.
При реконструкции томограммы фокальная зона решётки последовательно «помещается» в каждую визуализируемую точку пространства ОК в пределах выбранной зоны обзора. Помещается, конечно, виртуально, путем выборок соответствующих отрезков реализаций УЗ колебаний, принятых элементами антенной решётки, и когерентного суммирования этих отрезков для получения отражающей способности каждой точки материала ОК. Образ отражателя на томограмме формируется как результат наложения образов точечных отражателей (блестящих точек), из которых состоит отражатель. Если его физические размеры меньше длины УЗ волны или соизмеримы с ней, то он представляет собой всего одну блестящую точку. Тогда на томограмме отображается образ фокальной зоны, подобный образу на рисунке 2-10.
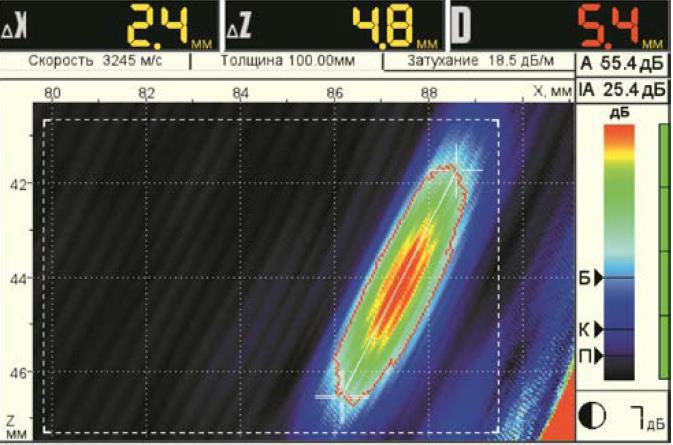
Рисунок 2-10 – Образ точечного отражателя (отверстия с полусферическим дном) на экране прибора. Образ оконтурен по уровню минус 6 дБ от его амплитудного значения
Если отражатель больше нескольких длин волн, то он может содержать несколько блестящих точек, которые дают изображение слившейся группы образов фокальных зон. Поэтому размеры и амплитуда образа отражателя на томограмме зависят от соотношения физических размеров отражателя и размеров фокальной зоны антенной решётки там, где расположен отражатель (рисунок 2-11).
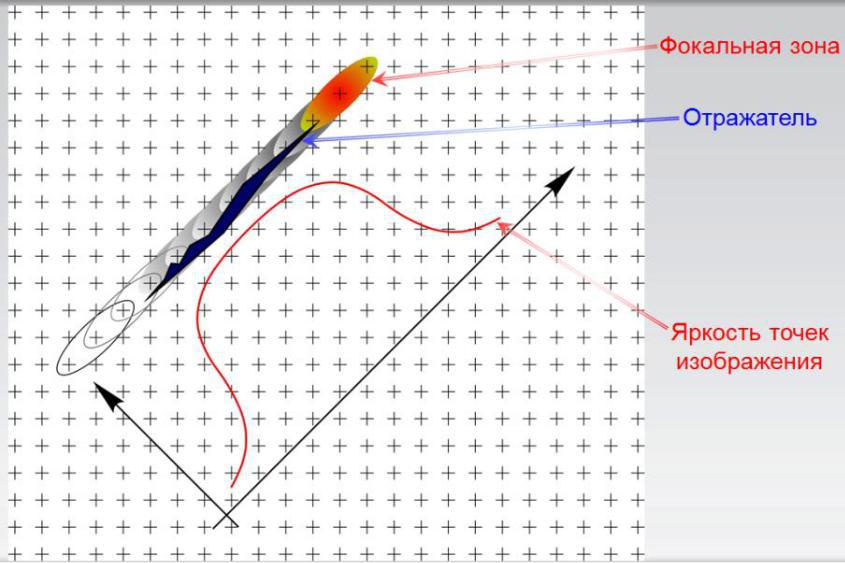
Рисунок 2-11 – Формирование образа отражателя, размер которого больше нескольких длин волн
Эти зависимости можно использовать для решения задач определения типа дефекта – объёмный / плоскостной и измерения физических размеров дефектов. Но в рамках данного документа данные решения не рассматриваются.



- Облегченный ударопрочный пластиковый корпус
- Быстросъемный аккумулятор
- Автономная работа с данными без внешнего компьютера
- Сухой акустический контакт
- Адаптация антенного устройства к неровностям поверхности конструкции
- Автоматическое измерение скорости распространения ультразвуковой волны в объекте контроля
- Трехмерное представление внутреннего строения объекта контроля и B-, C-, D-томограмм любого сечения объекта
- Возможность использования томографа при ручном контроле, а также в составе автоматизированных установок
Обработка и представление данных на экране томографа
В приборе используется метод синтезированной фокусируемой апертуры с комбинационным зондированием (САФТ-К), при котором происходит фокусировка ультразвука в каждую точку полупространства. Массив данных формируется путем сбора информации со всех измерительных пар антенного устройства томографа. Принимаемые антенной решеткой сигналы обрабатываются на встроенном компьютере непосредственно в процессе работы.
Затем полученные данные представляются на экране прибора и сохраняются в встроенной флеш-памяти. В результате получается наглядный образ сечения объекта контроля (В-тип), где разными цветами (в зависимости от выбранной цветовой схемы) закодирована отражающая способность каждой точки визуализируемого объема. Время сбора данных и вывода на экран образа сечения в одной позиции решетки – 3 сек.




Режимы работы
A1040 MIRA имеет два основных режима работы, а также функцию настройки конфигурации параметров контроля под каждый конкретный объект с возможностью последующего оперативного выбора:
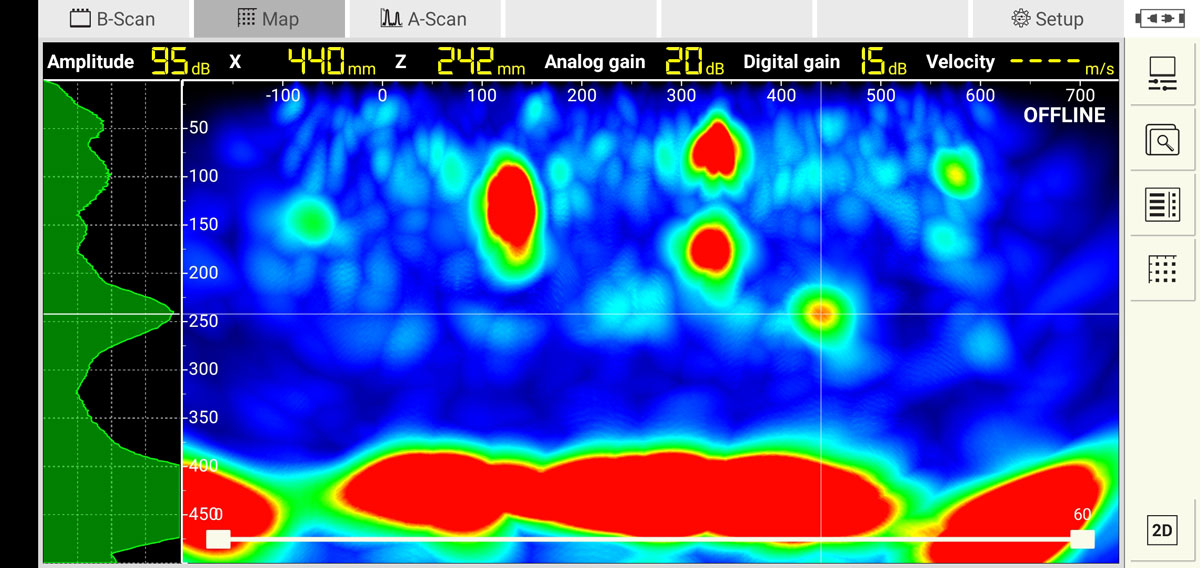
Режим «ОБЗОР»
Режим предназначен для оперативного просмотра внутренней структуры конструкции в произвольных местах. На экране отображается В-томограмма на глубину до 2 метров.
Дополнительно в данном режиме возможно:
- Автоматическое определение скорости распространения ультразвуковой волны.
- Измерение координат и уровней образов в томограмме.
- Измерение толщины конструкции.
- Просмотр А-Сканов.

Режим «КАРТА»
Режим предназначен для формирования массива данных в форме набора В-томограмм объекта контроля (перпендикулярных поверхности) при сканировании антенной решеткой вдоль ранее размеченных линий с постоянным шагом. Из накопленного 3-х мерного массива данных можно выводить на экран любое изображение В-типа.
Контроль проводится по схеме пошагового сканирования объекта контроля с объединением данных и реконструкцией объема под всей отсканированной площадью объекта контроля.

Функция «НАСТРОЙКА»
Используется для выбора и установки параметров и рабочей конфигурации.
Существует возможность создания и сохранения ряда рабочих конфигураций под различные объекты контроля. Возможность задания имени объекта и технических параметров, с последующим выбором их из памяти прибора перед началом контроля.




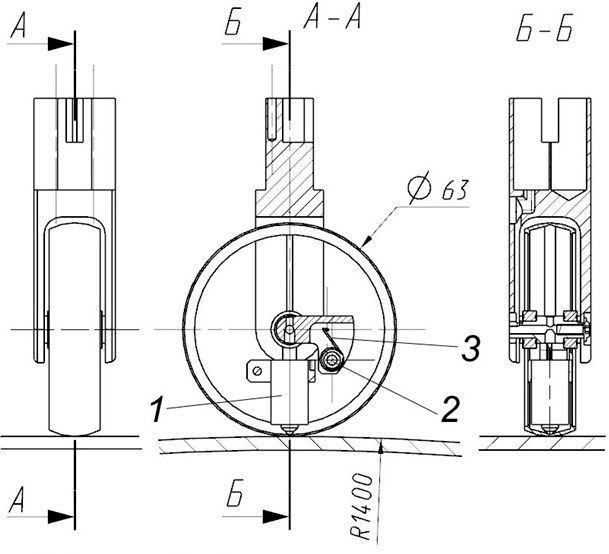
Рис 1.
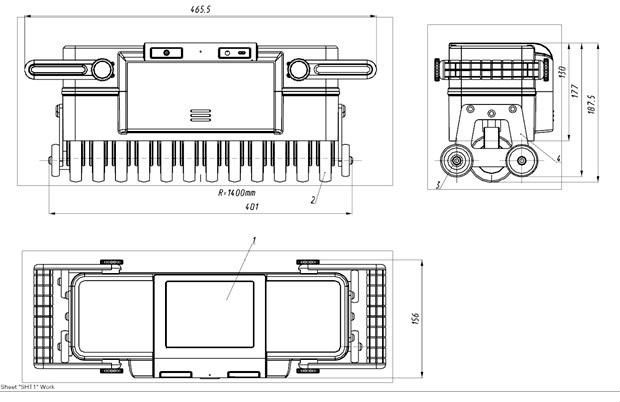
Рис 2.

Рис 3.
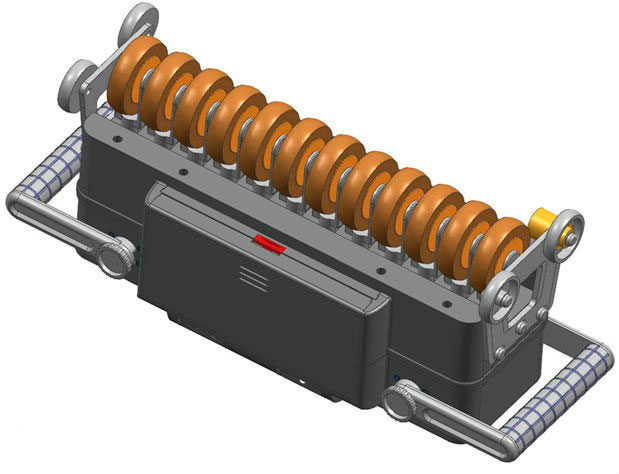
Рис 4.
- Принцип действия сканера-топографа основан на анализе параметров ультразвуковых сигналов, прошедших по материалу объекта контроля на небольшом участке (базе прозвучивания) между каждой парой соседних преобразователей, составляющих линейную антенную решетку
- Изменение разных параметров сигнала, амплитуды принятого сигнала, формы и полярности позволяет отличить сигнал, прошедший по алюминиевой обшивке самолета от сигнала прошедшего в дефектной зоне с другой толщиной и с другой плотностью
- Процесс обработки полученных сигналов включает в себя операции по выделению полезного сигнала из смеси его с шумом, операции измерения или оценки информативных параметров и отображение их на экране сканера-топографа в цветовой кодировке, удобной и понятной оператору
- В результате анализа принимаемых при сканировании ОК колебаний от каждой точки поверхности ОК с дискретностью 10 или 5 мм, в направлении сканирования в памяти аппаратуры сохраняется три информативных параметра от каждой пары соседних элементов АР. Каждая пара элементов АР дает строку изображения, состоящую из точек, в которых будет тем или иным способом отображаться информация о свойствах зоны ОК
- На экране прибора в цветовой кодировке отображается время задержки полезного сигнала, зависящее от материала ОК, толщины, текстуры, если материал волокнистый, и других свойств. Малое время задержки соответствует синему цвету, наибольшее время задержки соответствует красному цвету
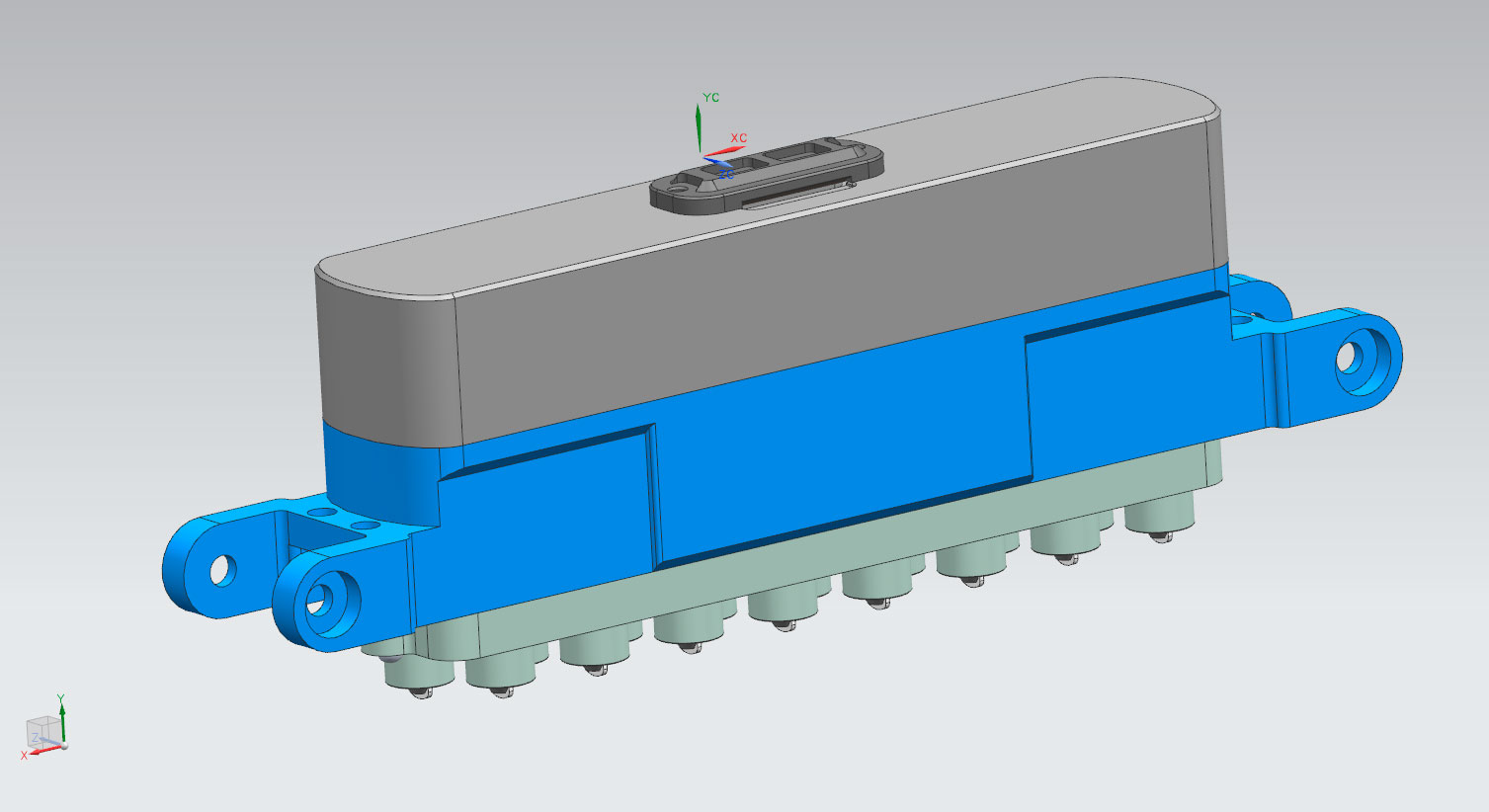
- Конструкция УЗ преобразователя с КТСК, основанная на принципе передачи нормальных к поверхности объекта контроля колебаний от пьезоэлемента к ОК и обратно через тонкий промежуточный слой твёрдого материала, выполнена на основе латунного обода колеса, внутри которого и установлена активная часть преобразователя
- Внутренняя поверхность обода колеса выполнена с очень малой шероховатостью (отполирована), что обеспечивает малый уровень шумов в сигнале приёмного преобразователя во время скольжения полированного контактного наконечника активной части преобразователя по поверхности обода
- Вилка колеса, установленная в корпус электронного блока прибора, с возможностью небольшого возвратно-поступательного движения (в пределах 10мм), подпружинена для создания прижима обода колеса к поверхности объекта контроля. (Рис.1)
- Для прозвучивания материала объекта контроля используются пара ультразвуковых преобразователей, установленных рядом с расстоянием 30 мм между их центрами, составляющие 12-ти элементную АР
- Пружина обеспечивает постоянный прижим преобразователей к объекту контроля
- 12-ти элементная линейная АР покрывает поверхность ОК полосой просканированного пространства, состоящей из 11 параллельных линий сканирования, отстоящих друг от друга на 20 мм, что составляет общий размер формируемого изображения равного 220 мм
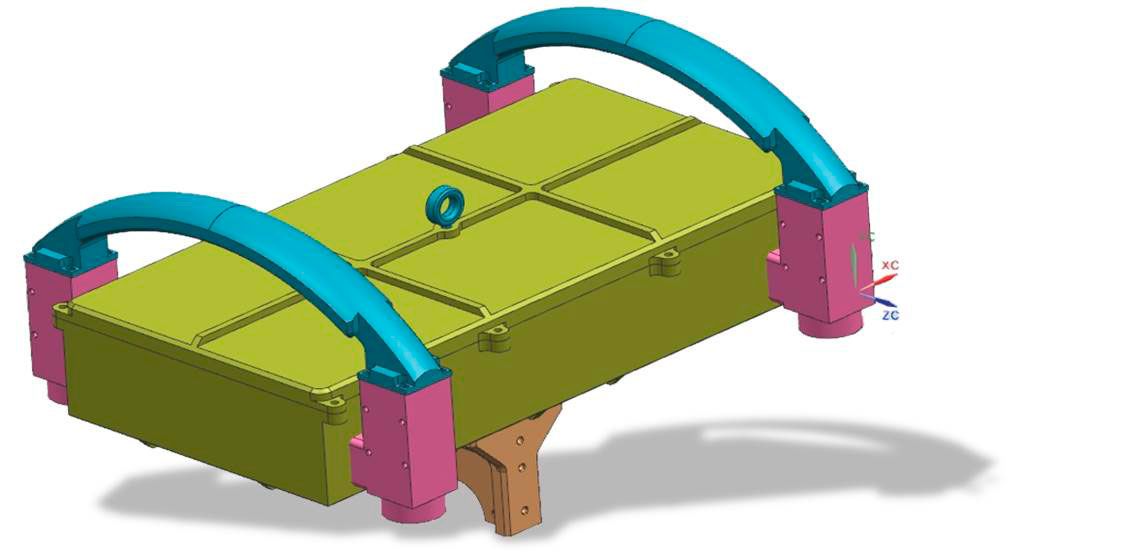
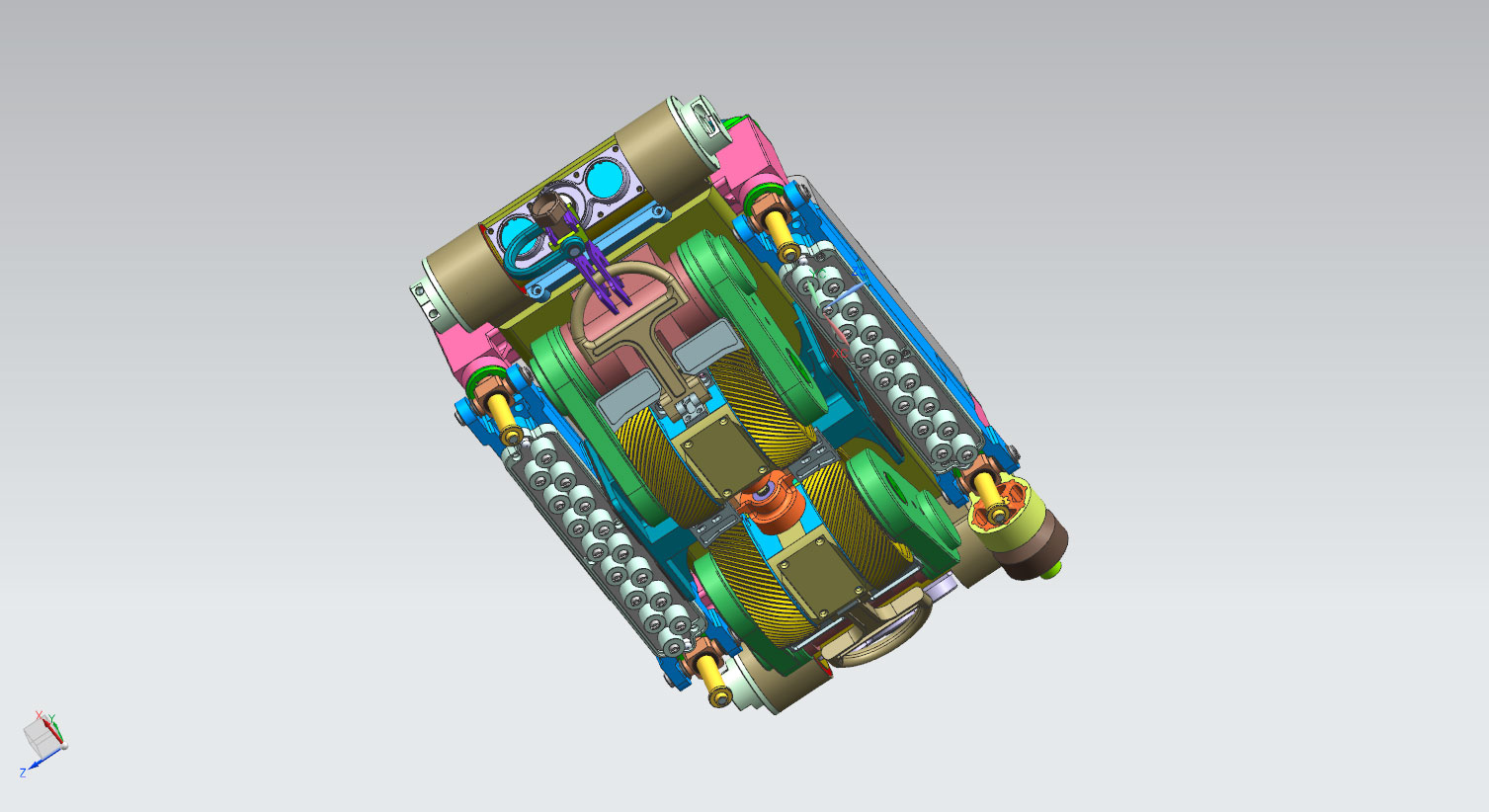
- Сканер – топограф представляет собой моноблок, содержащий в себе компьютер, АР, устройства управления, отображения результатов контроля и записи их в долговременную память, а также блок автономного питания. (Рис.2)
- АР моноблока смонтирована в нижней части прямоугольного корпуса, который снабжён ручками для его удержания. Ручки имеют несколько фиксированных положений, поэтому их можно установить под разными углами к лицевой панели. Все элементы АР имеют независимый подпружиненный подвес и могут перемещаться вдоль своих продольных осей. Это позволит вести контроль не только плоских участков ОК, но и выпуклых с радиусом кривизны от 1400 мм и более, а также и вогнутых с таким же минимальным радиусом. (Рис.3)
- При сканировании моноблоком поверхности ОК он будет опираться на 4 опорных колеса, а не на колёса элементов АР. При этом элементы будут прижиматься к поверхности ОК независимо друг от друга с силами, определяемыми только внутренними упругими устройствами элементов. От силы прижатия моноблока к ОК они не зависят. (Рис.4)
- Одна из пар опорных колёс закреплена на корпусе моноблока неподвижно. Другая пара установлена на оси, и может, как маятник поворачиваться вокруг неё в небольших пределах, заданных ограничителями. Такое решение обеспечивает устойчивую установку моноблока всеми четырьмя колёсами на поверхность ОК не только цилиндрической формы вдоль образующей, но и под острым углом к ней, а также на поверхности конической, сферической и более сложной формы, но с локальным радиусом кривизны не менее 1400 мм.
- На лицевой панели моноблока в центре расположен дисплей, а по обе стороны от него – 2 клавиатуры для управления прибором. Большое количество кнопок позволит выполнять любые манипуляции по управлению моноблоком с просмотром изображений, записью и считыванием их из памяти для вывода на экран и выполнением анализа и различных измерений




- Малогабаритная матричная антенная решетка на 32 независимых активных СТК элемента с возможностью объединения со второй решеткой для расширения апертуры (горизонтально/вертикально 4х16 и 8х8)
- Высокая скорость обработки и отображения данных с частотой 30Гц.
- Высокая производительность контроля благодаря одновременному излучению и приему сигналов всеми преобразователями
- Удобство визуализации 2D и 3D изображения объекта на мобильном устройстве, соединяемом с антенной решеткой посредством магнитного чехла



- Наглядное отображение сечения (B-Скан) объекта в режиме реального времени с частотой смены кадров до 10 Гц.
- Улучшенная чувствительность в ближней зоне.
- Высокая точность измерений и чувствительность прибора к различным отражателям.
- Размеры обнаруживаемых несплошностей:
- от Ø10 мм – цилиндрический образ дефекта;
- от Ø 25 мм – сферический образ дефекта. - Малогабаритная антенная решетка для длительной работы на объекте.
- Новый тип износостойких СТК преобразователей с безжидкостным контактом.
- Защита преобразователей от грязи и пыли благодаря прочной мембране.
- Чехол для удобного крепления электронного блока на поясе оператора.
Режимы работы
Томограф A1020 MIRA Lite два основных режима работы, а также функцию настройки конфигурации параметров контроля под каждый конкретный объект с возможностью последующего оперативного выбора. В процессе работы можно выбирать различные виды представления данных на экране томографа в зависимости от установленного режима.
Режим «ОБЗОР»
Режим предназначен для оперативного просмотра внутренней структуры объекта контроля в произвольных местах. На экране отображается В-Скан в режиме реального времени с частотой смены кадров до 10 Гц.

Дополнительно в данном режиме возможно:
- Автоматическое определение скорости распространения ультразвуковой волны.
- Измерение координат и уровней образов в томограмме.
- Измерение толщины объекта контроля.
- Сохранение и просмотр В-Сканов.
- Просмотр А-Сканов.
Режим «КАРТА»
Режим предназначен для формирования массива данных в форме набора В-Сканов объекта контроля (перпендикулярных поверхности) при сканировании антенной решеткой вдоль ранее размеченных линий с постоянным шагом. Из накопленного трехмерного массива данных можно выводить на экран любой В-Скан.

Режим «НАСТРОЙКА»
Используется для выбора и установки параметров и рабочей конфигурации. Существует возможность создания и сохранения, с присвоением уникального имени, ряда рабочих конфигураций под различные объекты контроля. Необходимая конфигурация выбирается из списка сохраненных непосредственно на объекте контроля.



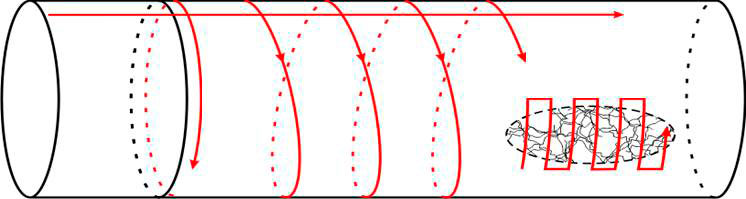
- Принцип работы устройства основан на волноводном эхо-импульсном методе контроля. Ультразвуковые колебания в металлическом теле трубы возбуждаются и принимаются бесконтактно (без применения контактной жидкости) с помощью электромагнитно-акустического (ЭМА) преобразователя
- Выявление в основном металле трубы стресс-коррозионных и коррозионных дефектов, выявление дефектов проката листов с указанием их количества, условных размеров и места расположения (координат)
- Связь между ПК оператора и сканером-дефектоскопом осуществляется посредством Wi-Fi связи, что обеспечивает большую мобильность оператора и возможность дистанционного контроля
- Получение результатов контроля в режиме реального времени, что дает возможности принятия оперативного решения о назначении дополнительного контроля
- Непрерывное документирование результатов контроля в виде сканограммы трубы
- Возможность оперативного просмотра полученных сканограмм на дисплее ПК.
- Постобработка сканограмм и регистрация результатов с указанием величины, местоположения, ориентации и типа дефекта
- Время подготовки сканера к работе составляет 3 минуты
- Возможность загрузки данных внутритрубной диагностики и приобщения их к отчету
- Блочная структура сканера-дефектоскопа позволяет обеспечить высокую ремонтопригодность и быструю замену блоков в полевых условиях одним оператором
- Сканер управляется одним и транспортируется двумя операторами, что обеспечивает высокую мобильность

- Возможность загрузки сканера через имеющиеся люк-лазы, свечные линии от Ду 300 мм, технологические отверстия 320х240 мм
- Обеспечивается внутритрубный контроль трубопроводов без дополнительных очистных мероприятий, при этом сканер движется по траектории вдоль трубы, объезжая загрязненные участки
- Обследование основного металла и сварных соединений элементов трубопроводов с применением телевизионно-оптической системы (визуально-измерительный контроль) и антенных решеток с акустическими датчиками с сухим точечным контактом (волноводный ультразвуковой контроль, поперечная ультразвуковая волна SH-поляризация)
- Блок управления предназначен для управления сканером, формирования первичных диагностических данных, и передачи их на ПК оператора
-
- Встроенные в сканер литий-феррум полимерные аккумуляторы емкостью 200 Вт*ч, обеспечивают до 8 часов автономной работы (скорость передвижения сканера: в транспортном режиме – до 5 п.м./мин., в индикаторном режиме контроля – до 0,3 п.м./мин.)
- Протяженность обследования обеспечивается отсутствием линий связи между оператором и сканером
- Управление движением сканера и получение диагностической информации на пульт оператора в режиме реального времени осуществляется по Wi-Fi каналу (на удалении до 1500 п.м. от места загрузки сканера)
-
- Блок ультразвукового контроля построен на базе ультразвуковых преобразователей с сухим точечным контактом (СТК), позволяющей возбуждать и принимать ультразвуковые колебания в стенке деталей трубопровода без применения контактной жидкости – только за счет трения керамического протектора преобразователя с поверхностью металла
- Набор из 32-х преобразователей СТК образует антенную решетку (АР), фазируемую в требуемом направлении и формирующую направленные ультразвуковые волны в стенке деталей трубопровода. Диапазон частот от 20 до 80 кГц. (поиск дефектов с высотой более 10% от толщины стенки деталей, эффективная длина контроля до 4 000 мм)
- Телевизионно-оптическая система сканера обеспечивает визуальный контроль в процессе выполнения работ по ВТД
- Телевизионно-оптическая система включает в себя HD камеру с 5 Мп матрицей и объективом с углом зрения 180 градусов, два светодиодных прожектора и привод поворота модуля в вертикальной плоскости
-
-
Скорость передачи видеоинформации с учетом пропускной способности радиоканала – до 20 кадров в секунду, что обеспечивает потенциальную производительность визуального контроля до 5 погонных метров в минуту
- Дополнительно в этом же модуле размещен датчик измерения концентрации метана и проекционный лазер
- На сканере размещены два идентичных блока телевизионно-оптической системы – в передней и задней частях корпуса. Направление обзора определяется оператором. Вторя камера необходима при реверсном перемещении сканера в трубах малого диаметра (Ду менее 500 мм), в которых невозможно выполнить разворот сканера
- Передвижение сканера-дефектоскопа по произвольной траектории обеспечивается магнитными мотор-колесными модулями
-
- Магнитный модуль изготовлен на основе редкоземельного магнита с высокой остаточной магнитной индукцией
- Усилие отрыва магнитного мотор-колесного модуля от ферромагнитной поверхности – 600 H (60 кгс)
- В модуль встроены датчики Холла, контролирующие напряженность магнитного поля контура «колесо-поверхность», позволяющие фиксировать момент отрыва колеса от ферромагнитной поверхности
- Встроенный в мотор-колесный модуль 3-х осевой МЭМС-инклинометр фиксирует угловое положение каждого модуля (погрешность измерения ± 0,1 градус), что позволяет реализовать функции трассировки пройденного участка ТТ КС и управления движения сканера-дефектоскопа в автоматическом режиме
- Прохождение сканера-дефектоскопа по внутренней полости ТТ КС по элементам различного сортамента (трубы, отводы, тройники, переходы, ЗРА) Ду 300-1400 мм обеспечивается конструкцией механической платформы
- Транспортная платформа построена на основе 2-х осевой схемы, позволяющей реализовывать алгоритмы проезда тройниковых соединений, объезда препятствий, движения по произвольной траектории.
-
- Габаритные размеры сканера (в транспортном режиме) 310х230х210 мм, масса сканера с преобразователями – 18 кг










- Ультразвуковой контроль реализован на базе двух многоэлементных антенных решеток и алгоритмов цифровой фокусировки апертуры (ЦФА), что обеспечивает максимально возможную для ультразвукового метода чувствительность к дефектам, селекцию их типов, измерение эквивалентной площади и полный контроль всего сечения шва и околошовной зоны
- Акустический контакт обеспечивается за счет автоматической подачи контактной жидкости из бака через инжекторы непосредственно под антенные решетки, что создает стабильный акустический контакт при малом расходе жидкости и позволяет контролировать не менее 10 погонных метров сварного шва от одной заправки бака
- Лазерно-оптический канал, кроме решения задач визуального контроля, непрерывно измеряет положение антенных решеток относительно оси сварного шва, что используется для коррекции траектории движения
- Транспортная система построена на базе магнитного мотор-колеса, что обеспечивает её надежное перемещение и удержание на всей окружности трубы, а так же прижим антенных решеток к поверхности
- Механический выключатель магнитного поля позволяет легко снимать и устанавливать сканер на поверхность тела трубы
- Трехмерный датчик угла наклона и система позиционирования GPS / ГЛОНАСС / Galileo обеспечивают пространственную привязку получаемых результатов
- Bluetooth гарнитура оператора (наушник) позволяет оперативно следить за процессом проведения контроля в зашумленных условиях и с помощью кнопки на гарнитуре дистанционно управлять движением сканера-дефектоскопа
- Управление всеми узлами устройства в процессе сканирования, обработка получаемых данных и хранение результатов измерений выполняется электронным блоком сканера-дефектоскопа
- Протокол контроля с перечнем обнаруженных дефектов и их параметров, а так же результаты проверки на соответствие проконтролированного шва действующим нормам отбраковки отображаются на встроенном дисплее.
- Литий-феррум-полимерный аккумулятор, встроенный в электронный блок, обеспечивает непрерывную работу устройства в течение 4 часов с возможностью полного цикла заряда за 15 мин
- Моноблочное исполнение устройства позволяет транспортировать и эксплуатировать сканер-дефектоскоп силами одного оператора


- Наличие режимов дефектоскопа и толщиномера
- Простота проведения контроля, малые габариты и вес
- Временная регулировка чувствительности (ВРЧ)
- Режим автоматической регулировки усиления (АРУ)
- Встроенные часы и датчик температуры
- Возможность отображения и сохранения результатов контроля на подключаемый компьютер

Многоканальный дефектоскоп- толщиномер АУИУ «СКАНЕР»
предназначен для создания на его основе автоматизированных линий высокоскоростного ультразвукового контроля в технологическом потоке производства различных изделий: труб, листов, дисков, колец, валов, поршней и т.п., заготовок металлоконструкций и других изделий. В зависимости от задачи контроля дефектоскоп может иметь до 32 независимых каналов. Дефектоскопия и толщинометрия сварных соединений и основного металла изделий проводятся со скоростью до 2 м/с.
Дефектоскоп имеет возможность подключения:
- внешнего компьютера;
- датчика измерения расстояний и/или фотозатворов;
- датчика угла поворота;
- дефектоотметчиков;
- блока управления внешними механизмами

- Автоматическая настройка - ВРЧ.
- Паспортизация преобразователей (измерение фактических параметров каждого применяемого ПЭП).
- Измерение акустических свойств материалов контролируемых объектов без использования дополнительного метрологического оборудования.
- Визуализация положения дефекта в слое металла или в сварном шве.
- Прямое измерение эквивалентной площади дефекта.
- Оценка конфигурации и размеров дефектов.
- Широкий частотный диапазон с плавной регулировкой от 0,2 до 10МГц.
- Два независимо управляемых строба (A и B).
- Автоматическое или ручное построение кривой ВРЧ (до 256 точек).
- Два вида представления сигналов: детектированый и радио.
- Построение и обработка A, B и D (TOFD) разверток.
- Режимы: огибающей, заморозки и отображения хода луча.
- Windows совместимость прикладного ПО.
- Автоматическое определение скорости УЗК в различных материалах и задержки в призме. База данных скоростей распространения УЗК.
- Встроенная система слежения за акустоконтактом для всех выполняемых УЗ приложений.
- Широкий частотный диапазон с плавной регулировкой от 0,2 до 10МГц.
- Два независимо управляемых строба (A и B).
- Автоматическое или ручное построение кривой ВРЧ (до 256 точек).
- Два вида представления сигналов: детектированный и радио.
- Построение и обработка A, B и D (TOFD) разверток.
- Режимы: огибающей, заморозки и отображения хода луча.
- Windows совместимость прикладного ПО.
- Автоматическое определение скорости УЗК в различных материалах и задержки в призме. База данных скоростей распространения УЗК.
- Встроенная система слежения за акустоконтактом для всех выполняемых УЗ приложений.
Преимущества новых технологий:
- Расширенный динамический диапазон до 140дБ, дает возможность выявлять как малые, так и большие дефекты без переключения чувствительности;
- Программируемый генератор (синтезатор) позволяет оптимально подобрать форму зондирующего импульса для датчиков с разными характеристиками, что значительно увеличивает чувствительность и улучшает выявляемость дефектов;
- Цифровая обработка данных позволяет существенно улучшить качество и достоверность контроля: (Компенсация РШХ для выявления подповерхностных дефектов на малых глубинах; Фурье анализ принимаемого сигнала для визуализации параметров акустического тракта;Цифровые фильтры и др.)

